人形机器人最精密结构!灵巧手深度研究(附细分企业)


热门主题产业链
7月10日,字节跳动Seed实验室发布ByteDexter灵巧手,具备20个自由度,可以通过遥操作等辅助设备实现人手的灵巧操作。#灵巧手#机器人
稍早,宇树科技发布的Unitree Dex5灵巧手,同样具备单手20个自由度,并演示了拿抛水果、打扑克、玩魔方、翻书、手指舞等动作,展现出较强的灵活性与操作能力。#宇树科技
清华大学教授孙富春曾说过:“机器人是自动化的‘最后一公里’,灵巧手是机器人‘最后的一厘米’。”
作为人形机器人最精密的结构,灵巧手一直被认为是商业化落地的关键。现在看,跑通“最后的一厘米”,或许就在眼前!
1
灵巧手
灵巧手是为多任务而研究开发的一种智能型通用机械手。机器人灵巧手从结构和功能上参考人手,能够灵活操作对象,实现对物体的灵活抓取,满足多种工作需求。


(资料来源:运控CMCIA,天风证券研究所)
人类手指前端四指各有4个自由度,其中掌指关节具有2个轴线垂直相交的转动自由度,合计16个,加上大拇指5个,合计21个自由度。灵巧手为了实现人手所能实现的功能,也要求具备与人手相差无几的自由度,以特斯拉OptimusGen3为例,预计拥有22个自由度。

(资料来源:萝卜易机器人,焉知人形机器人,东吴证券研究所)
灵巧手模块在机器人整机中价值量占比较高,以特斯拉Optimus第二代为例,其灵巧手约6-7.3万元,相对整机35-43万元成本占比达17.3%。随着灵巧手功能持续完善,叠加下游人形机器人的放量,预计2025年灵巧手市场规模将达19.21亿美元,2030年增长至30.36亿美元,5年复合增长率达9.59%。

(资料来源:中商产业研究院,前瞻产业研究院,东吴证券研究所)
2
灵巧手三大模块:驱动、传动、传感
一个典型的灵巧手系统包括三大核心部件模块,分别是驱动、传动和传感。
驱动模块:赋予灵巧手运动能力并输出动力,驱动系统包括液压驱动、电机驱动、气压驱动、形状记忆合金驱动等类型。
传动模块:将驱动系统产生的动力转换为手指关节的运动,主要传动方式有连杆传动、齿轮传动以及腱绳传动等。
传感模块:包括触觉、力觉传感器等,用于感知手部与外界物体的接触状态和力度,以及手部自身的位置和运动状态。
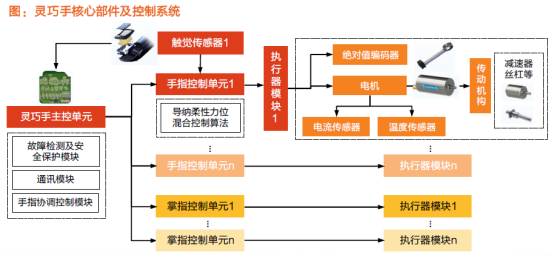
(资料来源:国家知识产权局,天风证券研究所)
02-1 驱动模块
灵巧手主要的驱动方式(驱动源)包括以下4种:
1)液压驱动:驱动系统一般由液动机、伺服阀、油泵和油箱等组成,驱动机械手完成任务。常被用于工业机械手中,适合大型抓取作业。
2)电机驱动:具备体积小、响应快,调控方便、稳定性好、精度高、输出力矩稳定等优点,在灵巧手控制中广泛应用。
3)气压驱动:优势在于操作方便、质量轻巧、动作迅速、价格适中、维护简便,缺点在于可操作性不强,轨迹精度不够。
4)形状记忆合金驱动:适合小型、高精度机器人装配作业,可以进行负载驱动,且反应快速,且位移大,变位迅速,但其无法长时间工作,并且疲劳强度较低。
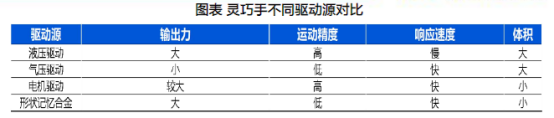
(资料来源:《腱驱动灵巧手指结构设计及其运动分析与试验》,电机联盟,国海证券研究所)
电机主要分为空心杯电机、直流无刷电机、直流伺服电机三类。其中,空心杯电机为灵巧手电机首选方案。
空心杯电机是一种采用无铁芯的直流永磁伺服电机,具备以下优势:1)无齿槽效应,低速运行平稳、低震动、低噪音,转子可控制在任意位置;2)能效高,转化效率超过70%,部分产品达到90%以上;3)结构紧凑,功率密度高,较相同功率铁芯电机重量、体积可减少30~50%;4)控制特性好,响应速度较快,具有良好的启动和停止特性,高速运行时转速调节灵敏;5)免维护,使用寿命长,空心杯电机电刷不易磨损无需定期更换。对于尺寸小、精度高、灵活性强的灵巧手,空心杯电机适配度极高。
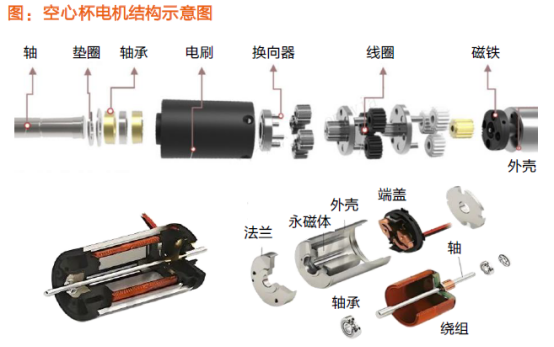
(资料来源:《机器人关节用伺服电机关键技术与展望》,天风证券研究所)
全球空心杯电机市场集中度较高,国际头部占据主要市场,国产替代性价比较高。2022年CR5达67%,Maxon、Faulhaber、Portescap等国际头部企业占据主要份额;国内制造商主要有鸣志、兆威、鼎智等,性能仍有一定差距,但具备一定性价比优势。
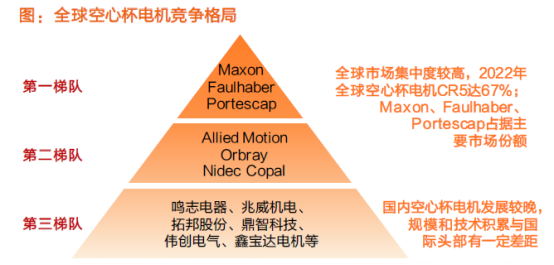
(资料来源:头豹研究院,天风证券研究所)
02-2 传动模块
灵巧手传动方案较多,各有优劣,目前主要有以下4种:
1)蜗轮蜗杆:通过蜗轮蜗杆把电机旋转运动转换为直线运动,优势在于数量更少,结构更简单,装配更容易,量产后成本更低;劣势在于传动效率低,且因纯刚性结构。
2)滚动丝杠:由电机带动旋转的丝杠利用摩擦转矩驱动滚柱转动,继而将丝杠的回转运动转换为螺母的直线往复运动,具备摩擦小、精度高、刚度高、传动可逆性等特点。
3)腱绳传动:能够将手掌或手臂内的电机运动动力传递到各手指关节;单根腱绳重量轻,适合空间狭小、需多自由度布局的场景;劣势在于绳索的张力和路径需要精确调整,可能需要复杂的调整机制,且缺乏刚度,抓握重物张力过大导致让力,容易握滑脱。
4)连杆传动:采用多个连杆串并联混合的形式传递运动和力矩,从而实现手指的运动。传递刚性比较强,且结构比较紧凑,但连杆手指受连杆尺寸以及传动误差的影响,不易实现远距离操作,抓取稳定范围较小。
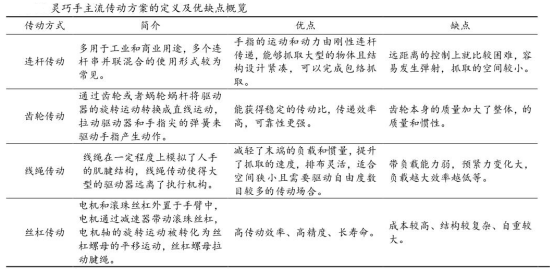
(资料来源:《机器人灵巧手研究综述》,方正证券研究所)
基础传动件减速器和丝杠在灵巧手中直接使用或集成于微型电机的用量较大,且刚性/柔性传动都有应用,部分案例减速器和丝杠可同时配置。其中,减速器主要用于降低电机转速、提高扭矩;丝杠主要用于将电机旋转运动转化为直线运动。
人形机器人减速器主流包括谐波减速器、RV减速器、精密行星减速器等。
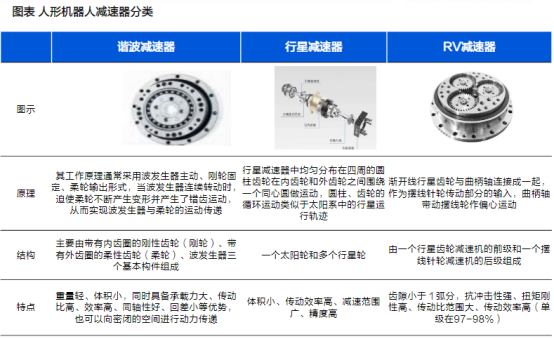
(资料来源:《工业机器人精密减速器的应用及现状》,国海证券研究所)
丝杠从设计结构角度可分为梯形丝杠、滚珠丝杠、滚柱丝杠。行星滚柱丝杠在主螺纹丝杠的周围行星布置了6-12个螺纹滚柱丝杠,滚柱螺母内使用的是小螺纹滚柱与主丝杠相互啮合,这时螺母的结构类似于行星齿轮箱。行星滚柱丝杠效率高体积小,较适合应用于灵巧手。

(资料来源:《行星滚柱丝杠设计》,天风证券研究所)
欧日企业垄断国内丝杠市场,国产厂商加速研发。2022年我国滚柱丝杠市场份额Top4厂家为瑞士Rollvis、瑞士GSA、德国Rexroth、瑞典Ewellix,合计占比78%,国内厂商南京工艺占比8%。
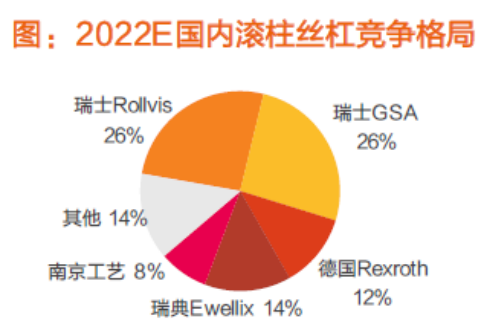
(资料来源:Persistence Market Research)
02-3 传感模块
传感器赋予机器人视、力、触、嗅、味等多种感知能力,通过对各关节的位置、速度、温度、载荷、电压等信息进行探测和了解,能够有效保证和提升机器人自身动作准确性和灵敏度。
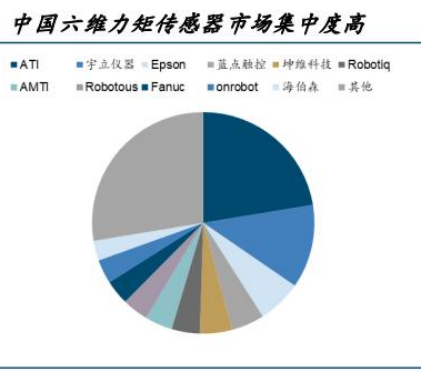
六维力矩传感器是众多力传感器中的关键部件。六维力矩传感器可以感知力系统中的三维力分量和三维力矩分量。在笛卡尔坐标系中,物体具有六个方向上的自由度,在没有外部限制的情况下,可以自由地在任意的空间内移动。因此,六维力矩传感器相较其他力矩传感器能感知更多的样本点和信息,功能更全面,应用更广泛,但研发难度和壁垒也相对较高。
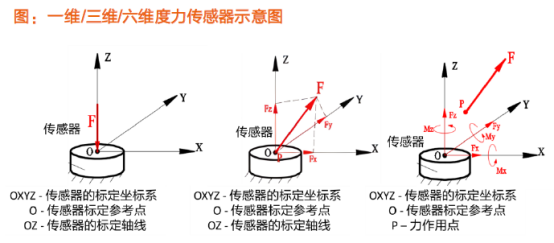
(资料来源:高工机器人公众号,天风证券研究所)
从全球六维力矩传感器的市场格局来看,海外力传感器行业发展较早,在设计和制造方面具有深厚的技术积累,目前海外供应商主要为ATI、Bota、Kistler等公司。国内厂商起步较晚,处于大力攻克技术难点的阶段,但目前已经涌现坤维科技、宇立仪器等一批优秀的供应商,未来有望逐步迭代产品,实现技术革新和成本优化。
(资料来源:中商情报网,国金证券研究所)
03
细分企业
03-1 电机
鸣志电器:全球市占率15%,产品应用于灵巧手关节驱动,2025年订单覆盖未来两年营收60%。
兆威机电:发布新一代灵巧手ZWHAND,聚焦具身智能的各种应用场景,DM17采用直线电机直驱解决方案,主动自由度为17,四指指尖压力5-12N。
田中精机:生产空心杯电机设备,主要应用于手指模组的空心杯电机;为苹果机器人提供无框力矩电机设备和空心杯电机设备。
03-2 减速器
中大力德:主要产品为精密减速器、减速电机及智能执行单元,精密减速器产品可用于人形机器人领域,为智元机器人定制行星减速器。
豪能股份:子公司积极布局机器人用高精密减速机及关节驱动总成,正开发高精密行星减速机、高精密新型摆线减速机等系列化产品,部分产品已在智能机器人等领域应用。
03-3 丝杠
恒立液压:行星滚柱丝杠突破C3级精度,江苏昆山工厂2025年投产,产能50万套。
浙江荣泰:收购狄兹精密,具备行星滚柱丝杠、直线驱动关节等产品加工能力。
03-4 传感器
柯力传感:精度达0.1%,与波士顿动力合作开发动态平衡系统,国产替代率从30%跃升至60%。
(特别说明:文章中的数据和资料来自于公司财报、券商研报、行业报告、企业官网、百度百科等公开资料,本报告力求内容、观点客观公正,但不保证其准确性、完整性、及时性等。文章中的信息或观点不构成任何投资建议,投资人须对任何自主决定的投资行为负责,本人不对因使用本文内容所引发的直接或间接损失负任何责任。)
来源:策金说
展开阅读全文