灵巧手产业链深度解析,附产业链个股!技术壁垒极高!


热门主题产业链
2025-02-27
灵巧手:技术集大成者,边际增量方向。灵巧手是人形机器人标配部件,技术壁垒极高。人形机器人的价值在于适应人类所有环境,而灵巧手是人形机器人的末端执行器,理想状态是能执行各种各样的任务,需要具备负载能力、运动能力、控制能力和感知能力等等,在设计和生产方面均有极高难度。
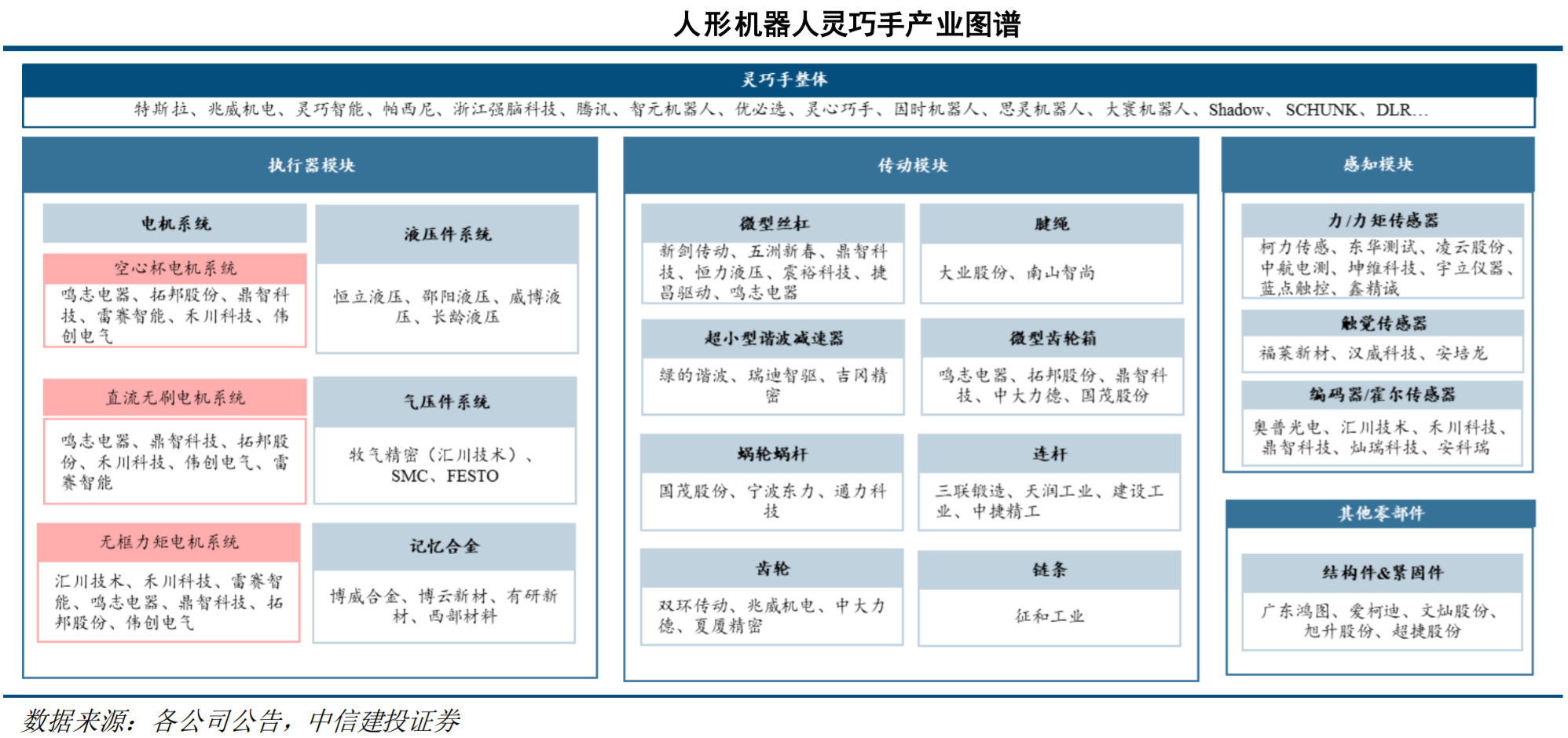


1)灵巧手整机:兆威机电等;
4)丝杠:五洲新春等;


灵巧手是机器人公司的重要发力点,特斯拉optimus对灵巧手持续研发和升级。
马斯克在1月底业绩会表态,将机器人2025年量产预期上调至1万台,此后产量或将以每年10倍的速度增长;2月初特斯拉招聘工程师为加州弗里蒙特工厂大规模量产人形机器人做准备。
行星滚柱丝杠是价值量最高的零部件,灵巧手或为竞争格局最好环节之一。


1.灵巧手可模拟人手的各种灵巧抓取和复杂操作,智能化、灵巧化程度逐渐提升,未来有望随着人形机器人和AI发展在工业、商业、航空航天、医疗等领域应用。

2.OptimusGen-3灵巧手预计拥有22个自由度,将使用17个线性执行器模块和腱绳模块。根据我们测算,随着特斯拉推动人形机器人及灵巧手产业链成本下降,未来供应商的单价和利润率虽然会呈现下行趋势,但是可以以价换量实现市场空间的几何级增长,Gen-3规格的灵巧手远期市场规模有望超千亿,微型丝杠、腱绳和传感器等零部件市场规模也将大幅扩张。

自20世纪70年代以来,多指灵巧手主要经历了三个发展阶段,逐步向智能化、灵巧化、抓取精准化方向发展。
20世纪70年代后以多自由度、多感知、可控制为标志的现代灵巧手产生。
20世纪90年代以后,灵巧手呈现集成化设计,使得灵巧手得以配备更复杂的驱动系统和更丰富的感知系统。
21世纪以来,灵巧手的集成化、智能化和灵巧操作水平实现新提升,向深度仿生发展。

灵巧手是特殊的末端执行器,向智能化、高灵活度发展

灵巧手是一种特殊的末端执行器,可模拟人手的各种灵巧抓取和复杂操作,实现与环境的良好交互。随着人形机器人和AI发展,以灵巧手为代表的高性能末端执行器,得到持续的研发投入和广泛关注,有望应用在工业、商业、航空航天、医疗等领域。

灵巧手具有高度灵活性、复杂性特点,可灵活执行抓取、操作任务。抓取动作可分为三大类:中间抓取、精准捏取和强力抓取,三种抓手类末端执行器的抓取动作执行能力对比如下:
两指夹持器结构简单,可以用于部分指面抓取运动,但手指灵活性差,无法抓持复杂目标和对目标物体实施具体操作。
多指抓持手通常具有3-4个手指,且手指上设置多个关节(多为被动关节),较两指夹持器抓持性能增强,但仅可执行部分依赖指面的指面抓取和强力抓取动作,精准性、稳定性、包络自适应性差。

多指灵巧手则可模拟人手的各种灵巧抓取和复杂操作,从而实现与环境的良好交互。为达到灵巧性要求,多指灵巧手至少需要3个手指和9个自由度,手指关节的运动副通常采用转动副,以便有效模拟人手,通过指关节运动抓取和操作目标物体。灵巧手凭借多自由度手指以及拇指额外的内/外旋运动可以良好实现强力抓取、精准捏取、中间抓取(三类手势动作使用比例达85%),满足大部分手部动作需求,能适应多种不同的对象和任务。

灵巧手具有多种类型解决方案
1.灵巧手驱动方案有电机驱动、液压驱动、气压驱动和形状记忆合金驱动等选择,目前以电机驱动为主流,具有控制精度大、输出力矩稳定等显著优点。
1)电机驱动技术成熟,是灵巧手中应用最为广泛的驱动方式。

2)气压驱动操作简单但不满足高精度要求。
3)液压驱动实现高能量密度输出驱动。
4)形状记忆合金驱动为新型驱动方式,采用特殊合金材料SMA。
2.灵巧手传动方案有腱绳传动、连杆传动和齿轮传动等选择,其中腱绳传动适应远距离传动,可灵活布置,传动柔性,应用最为广泛。

3.根据自由度与驱动源数量,灵巧手有全驱动和欠驱动两种方案,欠驱动得益于更简单的结构设计、更低的成本,应用更多。
4.根据应用的材料和结构,灵巧手可分为机械灵巧手和人工肌肉灵巧手,机械灵巧手为目前主流方案,人工肌肉灵巧手柔性特点突出。
5.灵巧手未来在柔性感知、紧凑化和精密化、深度仿生、创新型方案设计方面有望继续优化发展。

从传动方案来看,腱绳传动应用范围最广

1)腱绳传动是目前应用最广泛的传动方案。
从工作原理看,腱绳传动是指通过腱绳和缠绕腱绳的辅助装置把驱动源的力矩传送到手指各个关节上的传动方式,基本的工作原理是置于灵巧手前臂中的电机先驱动滚珠丝杠,借助滚珠丝杠上的螺母将转动变为平动,螺母上缠绕着腱绳,通过拉动另一边连接在灵巧手手指上的腱绳,实现手指绕关节轴的转动运动。腱绳传动因布置形式多变而结构不同,常见的结构形式有腱-腱鞘式、等径滑轮式和带轮传动式。
从运行特点看,腱绳传动适用于远距离传动,使得驱动器与执行器能够保持一定距离,减轻末端执行器的负载和惯量,从而提升抓取速度,提高灵活性;腱绳具有一定的弹性,为手指运动提供了一定程度的柔顺性和抓持适应性;腱绳传动中多采用钢丝、滑动轴承,可以减轻传动系统的摩擦,传递效率较高;腱绳可灵活布置,能够与丝杠、蜗轮蜗杆、链条等方案结合,在狭小空间中实现多自由度驱动。然而腱绳传动也存在部分缺点,包括负载弱、预紧力不稳定且绳索有弹性,干扰控制的精确性。腱绳传动应用较广,代表有特斯拉灵巧手、Utah/MIT手、DLR系列手、Shadow手等。

2)连杆传动采用多个连杆串并联混合形式,刚性强、机械结构复杂。
从工作原理看,以手指为例,手指指尖、二指节、三指节均为不同形状的三角形连杆,驱动连杆以及耦合连杆为直线形式,K1以及K2为复位弹簧,当K1处的驱动连杆顺/逆时针转动时,手指做屈曲/前伸运动。
从运行特点看,相比腱绳结构,连杆结构刚性强,可以实现强力抓取大型物体,连杆传动还具有抓取速度快、传动精确性高的优点。但连杆驱动较为复杂,要求零部件有较高的加工精度;相比腱绳传动,连杆传动柔性不足,使得灵巧手在抓握不规则形状物体时的包络性和自适应性较差。另外,连杆传动受机械结构的限制,不利于手指小型化和拟人化。
从典型案例看,韩国实验室研发的ILDA手采用集成连杆驱动,可以进行抓取鸡蛋、剪纸、夹装芯片和挤压瓶罐等操作。

3)齿轮传动结构复杂,限制其应用范围。
从工作原理看,齿轮传动将驱动器的旋转运动转变为直线运动,通过拉动驱动器和手指间的弹簧来驱动手指。
从运行特点看,齿轮传动具有稳定性强、精确性高、传递效率高的优点。但齿轮结构复杂,且若灵巧手手指较长、自由度要求较高,则传动所需的齿轮数目较多,使得灵巧手重量大、惯性大,限制了齿轮传动的应用。
从典型案例看,代表有北航研制的BH985灵巧手,采用连杆+齿轮传动,体积和自重较大。

从自由度与驱动源数量来看,灵巧手可以分为全驱动和欠驱动两大类。
1)全驱动灵巧手驱动源与自由度数量相等。
从工作原理看,全驱动灵巧手的每个手指关节单独配置了驱动器,使得每个手指都能实现独立控制,从而整手可以进行多种灵巧操作。
从运行特点看,全驱动灵巧手需要配置更多的驱动器,使得灵巧手成本上升、体积变大、操作复杂。
从典型案例看,全驱动灵巧手代表有MLR手、Shadow手、DLR手等,具有操作灵巧性强、成本高、操作复杂等共同特点。

2)欠驱动灵巧手驱动源数量少于自由度,缺失驱动源的部分进行耦合随动。
从工作原理看,欠驱动灵巧手的手指中的腱固定于手指末端,当驱动器拉动腱时,由于耦合作用使各关节转动,手指弯曲,先与物体接触的指节停止转动,其他指节继续转动,直至对物体形成力封闭构形,从而抓住物体。释放腱时,弹簧提供恢复力,使手指张开。
从运行特点看,欠驱动灵巧手驱动器少,结构较简单,硬件集成度高,重量轻,体积小,制造成本较低,易于维护;另外,欠驱动灵巧手具有被动柔顺特性,即在抓取物体时,会自动适应不同形状物体,抓取的包络性好。但是欠驱动灵巧手自由度较低,控制的精确度有所欠缺,影响灵巧手的功能操作。目前欠驱动方案应用较多,代表有 DART 手、FESTO 手等。

按照材料和结构分,灵巧手可分为机械灵巧手和人工肌肉灵巧手
1)机械灵巧手:主流灵巧手方案。工作原理上,机械灵巧手多采用金属材料制作,常配备复杂的电机与控制系统,通过模仿人类手指的骨骼结构来达到模仿人类手指形态的效果。运行特点上,机械灵巧手具有刚性强、抓握力强、抓握精准的优点,但抓取适应性较差、成本高、重量大、质地硬,人机交互的体验感较差。目前机械灵巧手是最常见的灵巧手形态。
2)人工肌肉灵巧手:新型灵巧手方案,具有柔性仿生特点。工作原理上,肌有高效性、灵巧性和可变性特点,人工肌肉是一系列设计得如肌节一样单轴拉伸的驱动器,典型的人工肌肉有气动型人工肌肉(PneumaticArtificial Muscles,PAMs)。PAMs 由两部分组成:可拉伸的圆柱形柔性薄膜和刚性末端,这两个部分共同作用,使驱动器体积增大时,其轴向发生收缩,而周向发生膨胀,从而模仿肌节的运动。运行特点上,人工肌肉灵巧手具有柔性强、抓取适应性强、轻质化、低成本化、高灵活度特点,适用于柔性抓取、医疗康复和智能穿戴等领域。不过其抓取控制精度和抓握力略弱于机械灵巧手。典型案例有 Festo 公司研发的 BionicSoft Hand,该款灵巧手共有 12 个自由度,没有任何骨骼,通过手指中的气动波纹管结构控制运动。当气室充满空气时,手指弯曲。
如果气室是空的,则手指保持笔直。手指中的波纹管被包裹在特殊的 3D 织物护套中,该护套由弹性和高强度线编织而成,可用于精确地确定结构在何处展开并产生力,以及在何处阻止其展开。

哈工大新型 4 指压电机械手,采用全新驱动方案。

柔性感知技术:深化灵巧手与非结构环境的交互作用
感知技术极大地影响灵巧手与环境的交互性。
多感知信息融合:灵巧手借助力传感器、位置传感器进行抓取操作,借助触觉传感器实时传输与物体的接触信息,融合多感知信息可以增强灵巧手对非结构环境的适应能力,是未来灵巧手技术发展的重要方向。
灵巧手逐渐向深度仿生发展,对柔性感知技术和传感器的需求增加。与刚性传感器相比,柔性传感器更加适应手的不规则表面,更容易与手的表面集成,即柔性传感器可以放置在整个手掌表面,而不局限于指尖,获得更加丰富的接触信息。
案例-TRX-Hand:具有多感知信息融合+柔性感知前沿技术。
触觉传感器模拟皮肤功能,成为人形机器人感知外界环境的重要器官。


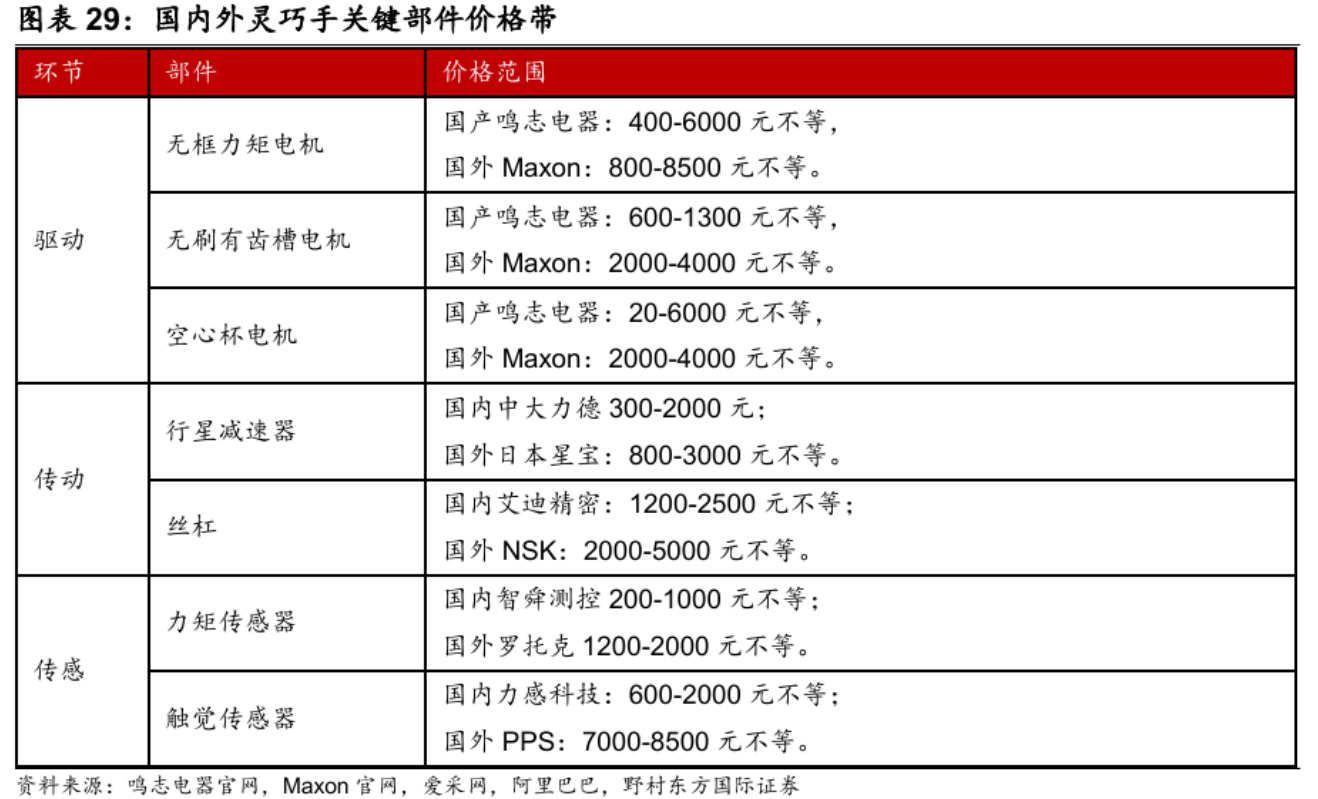
空心杯电机响应快、效率高;直流无刷电机控制精度较高、寿命较长;无框力矩电机拥有精度和紧凑度优势,但是小尺寸生产难度大

新型传动方案:行星滚柱丝杠/微型谐波减速器.微型谐波传动方案有望增加灵巧手精密度,但是过去产业不成熟。相比行星减速器,谐波减速器具备体积小、精度高等优点,若应用于灵巧手部件,则可以有效提高灵巧手精密化程度。不过,由于微型谐波减速器(外
径 10mm以下)应用场景较少,产业成熟度很低。目前,微型谐波减速器技术正逐步成熟,并开始应用于灵巧手零部件。

丝杠将旋转运动转化为直线运动,未来有望在灵巧手中应用。

灵巧手在适应性和数据可得性角度上均具备明显优势。
Optimus灵巧手复盘与前瞻:预计Gen-3将有更多线性执行器和腱绳。从自由度来看,OptimusGen-1和Gen-2灵巧手单手均拥有11个自由度;Gen-3灵巧手预计共有22个自由度,其中灵巧手的食指、中指、无名指分别具有4个自由度,拇指以及小指分别具有5个自由度。从驱动系统零部件来看,Gen-1和Gen-2灵巧手单手使用6个执行器模组+腱绳蜗轮蜗杆模块;Gen-3灵巧手单手预计使用17个线性执行器模块+腱绳模块。
Optimus小臂复盘与前瞻:Gen-3将更纤细,不再裸露线性执行器。OptimusGen-1、Gen-2和Gen-3小臂线性执行器大体架构类似,但是在细节上略有不同。Gen-1小臂线性执行器使用滑动丝杠,Gen-2和Gen-3则使用行星滚柱丝杠;Gen-1和Gen-2小臂线性执行器前后各有一个球关节且不固定在小臂上,Gen-3的线性执行器预计固定在小臂上且使用连杆,为手腕处预留更多空间。

OptimusGen-3规格高灵活度灵巧手远期市场空间有望超过千亿。特斯拉有望推动人形机器人及灵巧手产业链成本下降,进而带动灵巧手需求增长。预计未来零部件供应商的单价和利润率虽然会呈现下行趋势,但是可以以价换量实现市场空间的几何级增长。以OptimusGen-3规格的灵巧手测算,当人形机器人整机产量达到500万台时,灵巧手市场规模将达到1087.3亿元,微型丝杠、腱绳和传感器等零部件市场规模也将大幅扩张。
特斯拉的第一代机器人到第二代机器人,灵巧手增加了触觉感知;即将发布的第三代机器人,灵巧手进行了重要升级,自由度、驱动方式、传动方式、传感器等方面都有改进。灵巧手硬件包括驱动、传动和感知三个层面:
1)驱动:驱动系统是整个灵巧手的动力源,是手指输出力的来源。灵巧手按照位置分为驱动器内置、驱动器外置和混合式;电机类型包括空心杯电机、无刷有齿槽电机等,二者在性能和成本上各具优势;
2)传动:电机需要搭配传动部件使用,将驱动器产生的运动合力以一定的方式传递到手指关节,从而使关节做相应的运动。传动方案路线较多,其中腱绳驱动、齿轮和丝杠为当前的主流技术方向,灵巧手通过采用多种传统方式组合应用。
3)感知:触觉传感器本质上是将接触面形状、压力、摩擦力、温度等信息进行感知识别和转换的传感器,对于灵巧手获取信息和操作至关重要。目前技术尚未定型,多条技术路线并行发展,按照原理分为压电式、压阻式、电容式等;按照结构和材料不同分为力矩传感器、柔性传感器和mems压力传感器等。灵巧手涉及环节众多,精选具备产品竞争力和客户资源的公司。

1)灵巧手整机:兆威机电;
4)丝杠:五洲新春等;
-------------------------------
来源:龙头核心论
展开阅读全文
相关标的
 APP内打开
APP内打开