机器人关节模组:线性、旋转执行器核心组成梳理


热门主题产业链
一. 执行器分类
执行器又称为关节模组,负责驱动和控制机器人各个关节和部件的运动,分为旋转执行器、线性执行器两大类:
(1)旋转执行器:由无框力矩电机、减速器、力矩传感器、编码器、轴承构成。
(2)线性执行器:由无框力矩电机、滚柱丝杠、力矩传感器、编码器、轴承构成。
两大执行器的不同之处在于传动机构:旋转执行器采用减速器,线性执行器采用滚柱丝杠。
从特斯拉Optimus产品价值量来看,执行器占到人形机器人零部件价值量的一半以上。
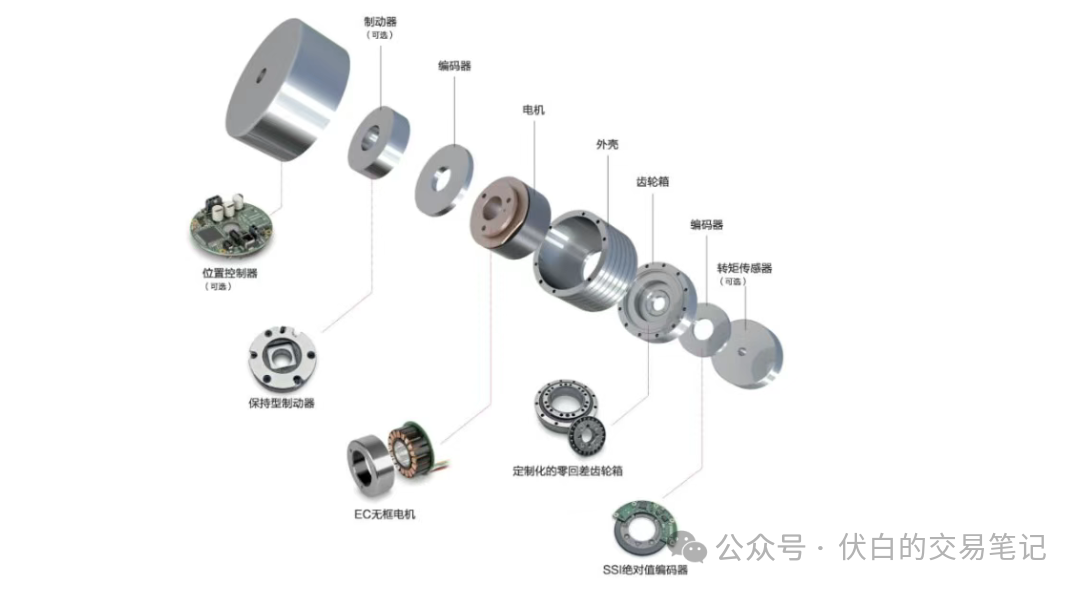
二. 旋转执行器概览
旋转执行器是让机器人关节进行旋转运动的装置,将电机输出由高速低扭转化为低速高扭的旋转运动,主要用于肩、髋、腕、头部。
主要构成包括:
(1)无框力矩电机:提供动力。
(2)谐波减速器:降低转速、增大扭矩。
(3)力矩传感器、编码器:监测运动状态。

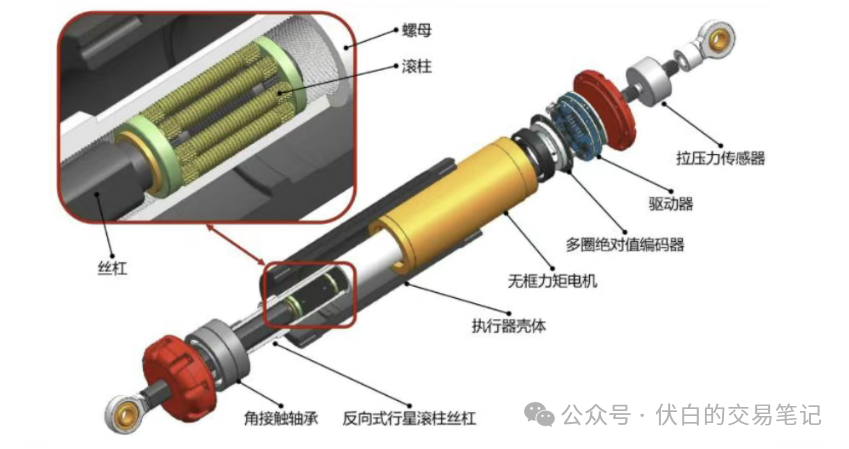
三. 线性执行器概览
线性执行器将电机输出的旋转运动转化为伸缩式直线运动,主要用于腕、肘、髋、膝、踝。
主要构成包括:
(1)无框力矩电机:提供动力。
(2)行星滚柱丝杠:将旋转运动转换为直线运动。
(3)力矩传感器、编码器:监测运动状态。
四. 核心部件梳理
4.1 无框力矩电机
无框力矩电机只有转子、定子两个部件,没有轴承、外壳,可直接集成于关节执行器,占用空间更少,目前已成为主流方案。
全球方面,头部厂商包括美国科尔摩根、德国威腾斯坦、瑞士Maxon Motor、德国TQ Robodrive等。
国内只有少量厂商提供,包括:步科股份、卧龙电驱、伟创电气、雷赛智能、昊志机电。
4.2 行星滚柱丝杠
丝杠是将电机的旋转运动转化为直线运动的机械部件,分为梯形、滚珠、行星滚柱三类,行星滚柱丝杠技术壁垒最高。
全球方面,市场集中度较高,瑞士GSA、瑞士Rollvis、瑞典Ewellix(舍弗勒旗下)、德国Rexroth(博世力士乐)等几家厂商占据主要份额。
国内方面,目前具备量产能力的仅有杭州新剑、南京工艺等少数几家;
处于送样、试产阶段的国内厂商包括:北特科技、贝斯特、双林股份、五洲新春、江苏雷利、震裕科技。
4.3 谐波减速器
减速器是电机和执行机构之间的减速传动装备,具有匹配转速和传递转矩的作用,分为行星、RV、谐波减速器三类。
谐波减速器体积小,结构简单,减速比高,传动精度高,主要用于旋转执行器。
谐波减速器全球市场集中度较高,日本哈默纳科一家独大,全球市场份额约80%。
4.4 力矩传感器
力矩传感器用于实时监测执行器的运行状态,为控制系统提供关键信息,确保机器人的动作精度。
按照测量维度,可分为一至六维力传感器,六维力矩传感器性能、技术壁垒、成本均最高。
全球方面,市场格局较为集中,前十厂商合计份额约70%,包括美国ATI、德国Schunk、瑞士Kistler等。
来源:伏白的交易笔记
展开阅读全文